


یک درایو با سرعت متغیر (VSD) از یک موتور و نوعی کنترلر تشکیل شده استVSD. های الکتریکی اولیه از ترکیب موتورهای AC و DC تشکیل شده بودند که به عنوان کنترل کننده های چرخشی استفاده می شدند. اولین کنترل کننده های الکترونیکی از یکسو کننده های تریستور (SCR) استفاده کردند که ولتاژ و در نتیجه سرعت موتورهای DC را کنترل می کرد. این VSD های DC هنوز به طور گسترده مورد استفاده قرار می گیرند و قابلیت های کنترل بسیار پیچیده ای را ارائه می دهند.
با این حال، موتور DC بزرگ، گران است و نیاز به نگهداری دوره ای برس دارد. موتور القایی AC ساده، کم هزینه، قابل اعتماد و به طور گسترده در سراسر جهان استفاده می شود. برای کنترل سرعت یک موتور القایی AC به یک کنترلر پیچیده تر که معمولاً اینورتر نامیده می شود نیاز است
🔹ارائه دهنده: تیم تولید محتوای میراکنترل
موتور القایی
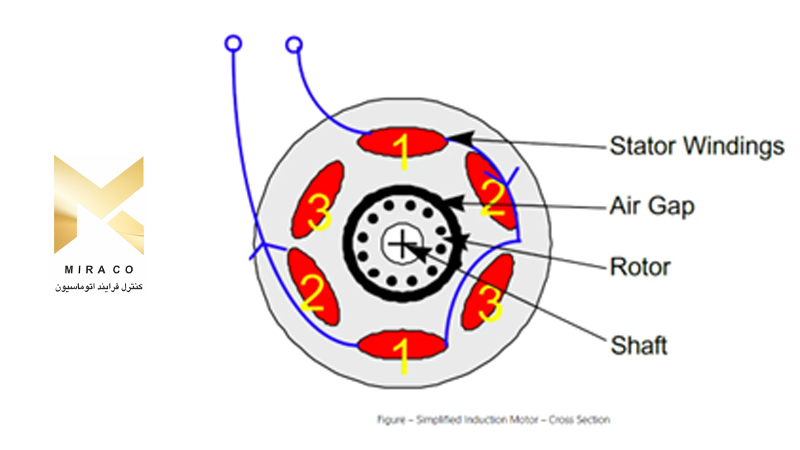
برای اینکه بفهمیم یک اینورتر چگونه کار می کند، لازم است بدانیم که یک موتور القایی چگونه کار می کند. یک موتور القایی مانند یک ترانسفورماتور کار می کند. هنگامی که استاتور (سیم پیچ ثابت و بیرونی) به یک منبع برق سه فاز متصل می شود، یک میدان مغناطیسی که در فرکانس پاور ساپلای می چرخد تنظیم می شود.
این میدان از شکاف هوایی بین استاتور و روتور عبور می کند و باعث می شود که جریان در سیم پیچ های روتور جریان یابد. این نیرو بر روی روتور ایجاد می کند زیرا جریان با میدان مغناطیسی در حال تغییر تعامل می کند و روتور می چرخد.
اگر سیم پیچ ها در چند جفت (یا قطب) مرتب شوند، فرکانس میدان دوار کمتر از فرکانس اعمال شده خواهد بود (به عنوان مثال دو قطب = 50/60 هرتز = 3000/3600 دور در دقیقه، اما چهار قطب = 50/60 هرتز = 1500/1800 دور در دقیقه).
با این حال، اگر روتور با همان سرعت میدان دوار کار کند، هیچ میدان مغناطیسی تغییری و در نتیجه گشتاوری وجود نخواهد داشت. بنابراین روتور همیشه کمی کندتر از میدان دوار به منظور تولید گشتاور کار می کند. این تفاوت در سرعت به لغزش معروف است.
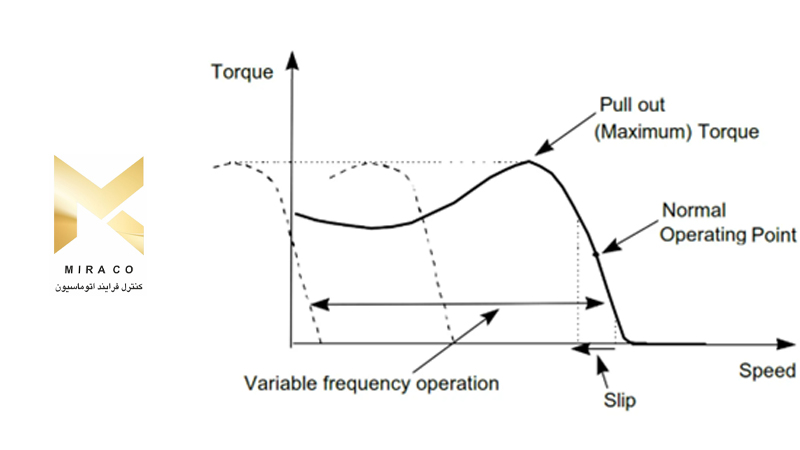
از این رو سرعت موتور به فرکانس اعمال شده و همچنین آرایش سیم پیچ و کمی به بار بستگی دارد.
بنابراین برای کنترل دور موتور لازم است فرکانس تغذیه کنترل شود. اگر فرکانس کاهش یابد، ولتاژ باید کاهش یابد وگرنه شار مغناطیسی خیلی زیاد می شود و موتور اشباع می شود.
بنابراین ولتاژ نیز باید کنترل شود. اگر فرکانس بالاتر از حد نرمال باشد، معمولاً برای حفظ حداکثر شار به ولتاژ بیشتری نیاز است. این معمولا امکان پذیر نیست، بنابراین گشتاور کمتری در سرعت بالا در دسترس است.
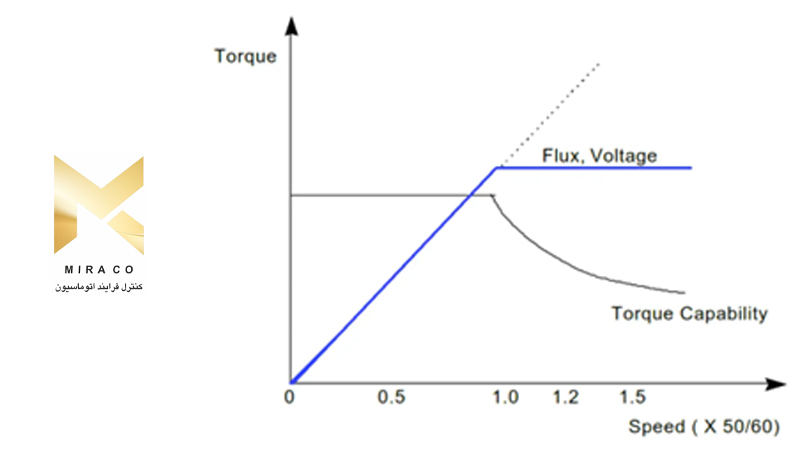
بنابراین برای کنترل سرعت یک موتور AC استاندارد، فرکانس و ولتاژ اعمال شده باید کنترل شود.
اگرچه کنترل ولتاژ و فرکانس در این توان های بالا دشوار است، اما استفاده از یک موتور القایی استاندارد امکان ساخت یک سیستم کنترل سرعت مقرون به صرفه را فراهم می کند.
اینورتر فرکانس متغیر
مبدل الکترونیکی که جریان مستقیم (DC) را به جریان متناوب (AC) تبدیل می کند به عنوان یک اینورتر شناخته می شود. کنترلکنندههای سرعت الکترونیکی برای موتورهای AC معمولا منبع AC را با استفاده از یکسوساز به DC تبدیل میکنند و سپس آن را با استفاده از یک پل اینورتر به منبع AC فرکانس متغیر و ولتاژ متغیر تبدیل میکنند.
اتصال بین یکسو کننده و اینورتر پیوند DC نامیده می شود. بلوک دیاگرام یک کنترل کننده سرعت (که اغلب اینورتر نامیده می شود) در زیر نشان داده شده است:
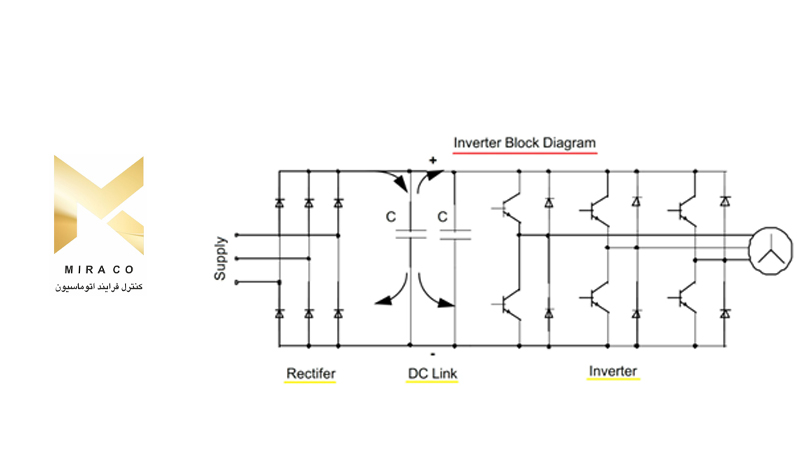
پاور ساپلای ، که می تواند تک فاز (معمولاً با توان کم) یا سه فاز باشد، به یک یکسوساز موج کامل تغذیه می شود که خازن های پیوند DC را تامین می کند. خازن ها ریپل ولتاژ را کاهش می دهند (مخصوصاً در منابع تک فاز) و انرژی را برای قطع های کوتاه شبکه تامین می کنند.
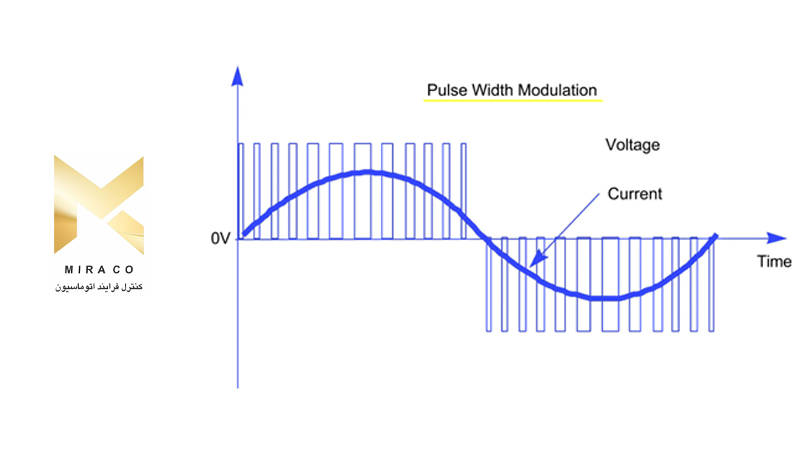
ولتاژ خازن ها کنترل نشده است و به حداکثر ولتاژ منبع AC بستگی دارد. ولتاژ DC با استفاده از مدولاسیون عرض پالس (PWM) به AC تبدیل می شود. شکل موج مورد نظر با روشن و خاموش کردن ترانزیستورهای خروجی (ترانزیستورهای دوقطبی گیت ایزوله، IGBT) در فرکانس ثابت (فرکانس سوئیچینگ) ایجاد می شود.
با تغییر زمان روشن و خاموش کردن IGBT ها می توان جریان مورد نظر را تولید کرد، اما ولتاژ خروجی همچنان یک سری پالس موج مربعی است. مدولاسیون عرض پالس در شکل زیر نشان داده شده است.
بسیاری از جنبه های پیچیده اینورتر وجود دارد که باید در طول طراحی در نظر گرفته شود:
- سیستم کنترل برای محاسبه نیازهای PWM بسیار پیچیده است و مدارهای مجتمع (ASIC) با طراحی خاص مورد نیاز است.
- الکترونیک کنترل اغلب به لینک DC که به پاور ساپلای متصل است وصل می شود، بنابراین اتصالات مشتری، نمایشگر و غیره باید به طور ایمن از آن جدا شود.
- جریان خروجی باید به دقت کنترل شود تا از اینورتر و موتور در هنگام اضافه بار و اتصال کوتاه محافظت شود.
- در اولین کلید روشن، خازن های پیوند DC تخلیه می شوند و جریان هجومی باید محدود شود، معمولاً از مقاومتی استفاده می شود که پس از چند ثانیه توسط یک رله دور می زند.
- همه اتصالات به اینورتر، به ویژه اتصالات تغذیه و کنترل، ممکن است تداخل زیادی داشته باشند و باید با قطعات حفاظتی مناسب نصب شوند.
- یک پاور ساپلای داخلی با چندین ولتاژ خروجی مختلف برای تامین الکترونیک کنترل مورد نیاز است.
- اینورتر، به خصوص IGBT ها و دیودهای یکسو کننده، گرما تولید می کنند که باید با استفاده از فن و هیت سینک دفع شود.
- ولتاژ خروجی PWM شامل بسیاری از هارمونیک های فرکانس بالا (به دلیل سوئیچینگ سریع) است و می تواند منبع اصلی EMI باشد.
- یکسو کننده ورودی فقط در اوج شکل موج تغذیه جریان می کشد، بنابراین جریان های ورودی دارای ضریب شکل ضعیفی هستند (یعنی مقدار RMS می تواند بسیار زیاد باشد – این به این معنی نیست که اینورتر ناکارآمد است!)
یک اینورتر کاربردی باید برای سهولت استفاده و نصب طراحی شود. اینورترهای بزرگ اغلب به طور خاص برای هر کاربرد طراحی یا مهندسی می شوند. اینورترهای کوچکتر برای مصارف عمومی طراحی شده اند و دارای طراحی استاندارد هستند. بخش استاندارد درایوهای زیمنس اینورترهای استاندارد تا 90 کیلووات را برای این منظور تولید می کند.
برای سفارش و یا خرید انواع محصولات ابزار دقیق و همچنین کسب اطلاعات بیشتر و مشاوره رایگان با شماره های 88341674-021 | 88341172-021 تماس حاصل فرمایید.
منبع: