
سیستمهای اتوماسیون صنعتی امروزی پیشرفتهتر و با فناوریتر از همیشه هستند. با این حال، آنها به تنهایی به این راه نرسیدند!
کنترلکنندههای منطقی قابل برنامهریزی (پی ال سی) ستون فقرات خود را تشکیل میدهند و به اجزای داخلی اجازه میدهند تا به عنوان یک واحد بدون درز با هم کار کنند. این رایانه های دیجیتالی همه کاره و قابل تغییر برای بسیاری از سیستم ها و دستگاه هایی که امروزه به آنها تکیه می کنیم ضروری هستند.
به ما بپیوندید تا نگاهی عمیق به اصول اولیه پی ال سی و راهنمای کنترل کننده منطقی قابل برنامه ریزی بیندازیم. و به افراد غیرمعمول نیز اجازه میدهیم تا بفهمند این اجزا چگونه کار میکنند و چرا اینقدر مهم هستند.
🔹ارائه دهنده: تیم تولید محتوای میراکنترل
فهرست مطالب:
🔰پی ال سی چیست؟
🔰اجزای اصلی پی ال سی
🔰سیستم عامل در مقابل برنامه کاربر
🔰برنامه نویسی پی ال سی
🔰ایجاد یک برنامه پی ال سی
پی ال سی چیست؟
قبل از اینکه خیلی به جزئیات فنی بپردازیم، بیایید نحوه عملکرد یک سیستم پی ال سی را بررسی کنیم.
این یک دستگاه کامپیوتری تخصصی، سخت شده است که برای استفاده در سیستم های کنترل صنعتی طراحی شده است. این دستگاه ها و تجهیزات را با اتصال واحدهای مختلف کنترل می کند و آنها را قادر می سازد تا به صورت هماهنگ کار کنند.
چه چیزی این قدرت را به آن می دهد؟
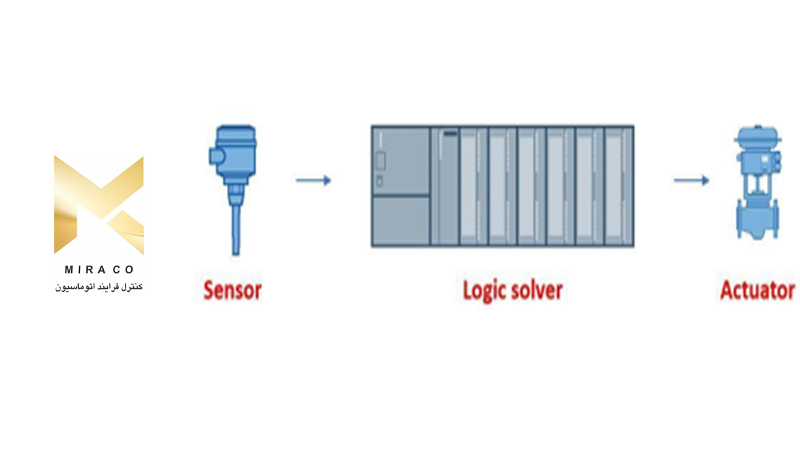
در هسته هر پی ال سی یک پردازنده کامپیوتری اصلی وجود دارد که ورودی های مختلف را جمع آوری کرده و آنها را برای رسیدن به خروجی مورد نظر ارزیابی می کند. ورودی ها می توانند دیجیتال یا آنالوگ باشند. از آنجایی که کاربران میتوانند سیستم را به روشهای مختلف برای تناسب با یک سناریوی خاص برنامهریزی کنند، پی ال سی ها در بسیاری از کاربردها در صنایع مختلف از جمله سیستمهای نوار نقاله، پالایشگاههای نفت، خطوط تولید و موارد دیگر مورد استفاده قرار می گیرند.
در حالی که اینها ممکن است سناریوهای پیچیده تری باشند، تعامل بین یک کلید روشنایی ساده و یک لامپ را در نظر بگیرید. با چرخاندن سوئیچ، کاربر فقط می تواند چراغ را روشن یا خاموش کند. تطبیق پذیری یا انعطاف پذیری کمی در این برنامه وجود دارد.
حال بیایید تصور کنیم که یک پی ال سی به این ترکیب میپیوندد. به طور ناگهانی کاربر می تواند کنترل های پیچیده تری ایجاد کند. به عنوان مثال، او می تواند چراغ را روشن یا خاموش کند یا یک دقیقه پس از روشن شدن چراغ را خاموش کند. اکنون به هزاران یا حتی ده ها هزار مدار فکر کنید که همگی با هماهنگی یکدیگر کنترل می شوند. در حالی که این یک توضیح ساده است، اساساً این همان کاری است که یک پی ال سی انجام می دهد.
چگونه کار می کند؟
ما پوشش دادهایم که یک پی ال سی برای کنترل تعداد بیشماری از خروجیها به یک پردازنده کامپیوتری متکی است تا ورودیهای بیشماری را به منطق تبدیل کند. با این حال، چگونه این اتفاق می افتد؟
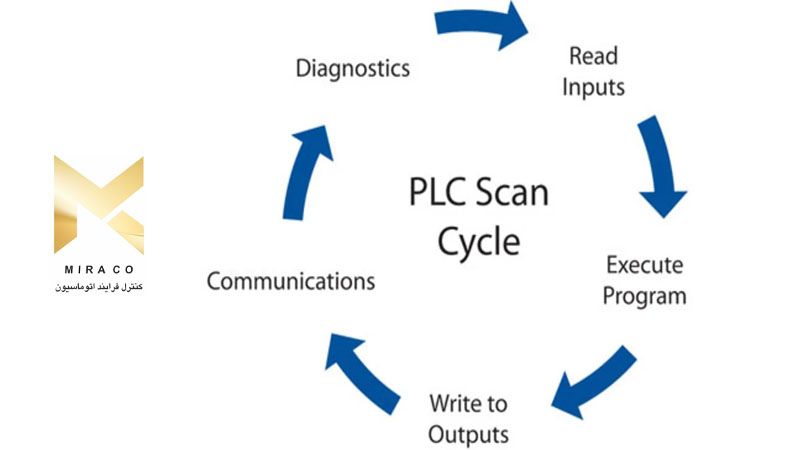
همانطور که پی ال سی ورودی ها را از چندین منبع اسکن می کند، آنها را اسکن کرده و درونی می کند. سپس برنامه نویسی کاربر را اجرا می کند تا خروجی های مورد نظر را اعمال کند.
در مرحله بعد اطلاعات لازم را به یک شبکه کنترلی مانند Modbus یا IP Ethernet ارسال می کند. از آنجایی که پی ال سی ها مسئول سیستم های حیاتی ماموریت هستند و معمولاً افرادی در نزدیکی ماشین ها هستند، قبل از اینکه دوباره ورودی ها را اسکن کند، یک سری عیب یابی برای اطمینان از درست بودن همه چیز انجام می شود. کل این فرآیند «چرخه اسکن» است. هرچه تعداد ورودی ها بیشتر باشد، برنامه پی ال سی بزرگتر و چرخه اسکن طولانی تر می شود. چرخه اسکن در میلی ثانیه اندازه گیری می شود که بیشتر به عنوان “سریع” شناخته می شود.
با این حال برخی از برنامهها وجود دارند که به اندازه کافی سریع نیستند. ممکن است به یک کنترل کننده اتوماسیون قابل برنامه ریزی یا PAC نیاز باشد. یک PAC از چندین CPU در یک سیستم یا شاسی واحد برای ارائه پردازش موازی یا پردازش تخصصی جنبههای مختلف برنامه استفاده میکند.
اهمیت برنامه نویسی کاربر در اینجا نهفته است، زیرا این برنامه چیزی است که باعث می شود پی ال سی نتایج مورد نظر را ایجاد کند. بدون آن، پی ال سی فقط یک گیت گران قیمت است.
به این ترتیب، یک پی ال سی اغلب به عنوان یک کامپیوتر کوچک و تخصصی توصیف می شود. اصطلاحات مشابهی با سیستمهای محاسباتی سنتی از جمله حافظه، نرمافزار، CPU، سیستم I/O و غیره دارد.
با این حال یک پی ال سی برای عملکرد در یک محیط صنعتی ساخته شده است، ورودی ها و خروجی های بتن را از دستگاه ها، ماشین ها و کارگران کنترل می کند. در حالی که یک کامپیوتر شخصی برای وجود در خانه یا محل کار شما ساخته شده است.
اجزای اصلی پی ال سی
PLC ها دارای اندازه های مختلفی هستند و دارای سطوح مختلفی از قابلیت ها هستند. برخی از طبقه بندی های اصلی شامل رله های قابل برنامه ریزی هوشمند، پی ال سی های فشرده، پی ال سی های مدولار و پی ال سی های کوچک-متوسط-بزرگ است.
پی ال سی های فشرده
این سیستم ها که به عنوان پی ال سی های یکپارچه یا رله های قابل برنامه ریزی هوشمند نیز شناخته می شوند. دارای یک سیستم کامل هستند که همگی در یک کیس کوچک بسته بندی شده اند. با توجه به این طراحی، سازنده به جای کاربر، تعداد و نوع ورودی ها و خروجی ها را تعیین می کند.
پی ال سی های مدولار
این پی ال سی ها شامل چندین قطعه هستند که همگی به یک قفسه متصل شده اند. پی ال سی های مدولار می توانند در اندازه های مختلف با سطوح مختلف قدرت و قابلیت عرضه شوند.
پی ال سی های کوچک، متوسط و بزرگ
اندازه این پی ال سی ها با توجه به کاربردهای خاصی که برای آنها مناسب است، متفاوت است.
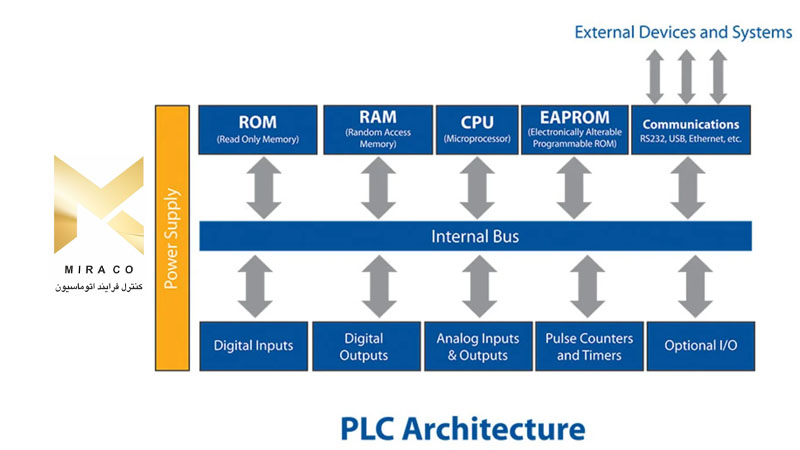
اگرچه همه این پی ال سی ها صرف نظر از دسته بندی، از یک اندازه بودن دور هستند، اما هر کدام شامل نوعی از این چهار جزء است:
- واحد پردازش مرکزی
- رک یا روش های نصب
- منبع تغذیه
- بخش ورودی/خروجی (I/O)
بیایید هر یک از اینها را با جزئیات مرور کنیم تا متوجه شوید که چگونه اجزاء با هم کار می کنند.
منبع تغذیه
همانطور که از نام آن پیداست، منبع تغذیه قطعه ای است که پی ال سی را در حال کار نگه می دارد و ولتاژ خط 24VDC یا 120VAC را در اکثر موارد ارائه می دهد. اکثر منابع تغذیه دارای یک باتری پشتیبان هستند که از از دست رفتن اطلاعات در هنگام قطع برق جلوگیری می کند.
سی پی یو واحد پردازش مرکزی
واحد پردازش مرکزی (CPU) مغز پی ال سی است. اکثر پردازنده ها معمولاً حاوی یک ریزپردازنده هستند که منطق را پیاده سازی می کند و ارتباطات بین همه ماژول ها را کنترل می کند.
ذخیره سازی حافظه توسط پردازنده به منظور ذخیره نتایج عملیات منطقی اجرا شده توسط ریزپردازنده مورد نیاز است. سایر قسمت های CPU که به حافظه نیز نیاز دارند برنامه های EPROM یا EEPROM plus RAM هستند.
برای درک بیشتر CPU، باید آنچه را که CPU برای پی ال سی انجام می دهد، توضیح دهیم. کاربر داده ها را با استفاده از منطق نردبان وارد می کند و CPU این فعالیت را کنترل می کند. از طریق روشی به نام اسکن برنامه پی ال سی اجرا می شود.
این اسکن معمولاً با خواندن وضعیت ورودی ها توسط CPU شروع می شود. سپس برنامه کاربردی اجرا می شود. سپس CPU وظایف تشخیصی و ارتباطی داخلی را انجام می دهد. سپس وضعیت خروجی ها به روز می شود. این یک روند تکراری است که از نو شروع می شود.
توابع پردازنده
وظیفه اصلی CPU اجرای برنامه و تصمیم گیری های مورد نیاز پی ال سی به منظور کارکرد و برقراری ارتباط با سایر ماژول های پی ال سی است.
بخش حافظه CPU به صورت الکترونیکی برنامه پی ال سی را با سایر اطلاعات دیجیتال ذخیره می کند.
تست خود تشخیصی CPU
یکی از مسئولیت های اصلی CPU این است که به اپراتور و برنامه کنترل در مورد هر گونه خطای شناسایی شده در هر یک از اجزای پی ال سی، از جمله در برنامه کاربر یا در خود CPU، هشدار دهد.
برای انجام این کار، CPU باید دو نوع تست را انجام دهد: تشخیص راه اندازی و تشخیص زمان اجرا. سپس نتایج این تست ها توسط چراغ های LED وضعیت CPU نشان داده شده و در حافظه CPU ذخیره می شود.
در برخی از سناریوهای خطا، عیب را می توان بدون اینکه باعث توقف عملکرد برنامه کنترلی پردازنده شود، شناسایی و برطرف کرد. در برخی موارد ممکن است نیاز به ادامه کار تحت محدودیت های خاصی داشته باشد و در موارد دیگر، ممکن است نیاز به خاموش شدن کامل داشته باشد.
اینها معمولاً به عنوان “عیوب اصلی” یا “عیب های جزئی” طبقه بندی می شوند. خطاهای بزرگ باعث می شود که پردازنده عملکرد خود را متوقف کند و به حالت STOP برود. ایرادهای جزئی را اغلب می توان در حالی که CPU هنوز در حال کار است برطرف کرد.
ماژول CPU تمام کدهای خطا را در بخشی از حافظه به نام ناحیه وضعیت سیستم ذخیره می کند. هنگامی که یک خطای قابل بازیابی رخ می دهد، کاربر می تواند به آن اطلاعات خطا دسترسی پیدا کند و از آن برای اصلاح عیب و بازگشت به عملکرد عادی استفاده کند.
سایر طبقه بندی های خطا
زمان اسکن بیش از حد
خطای بحرانی کمتر؛ برخی از خطاهای برنامه نویسی ممکن است آنقدر مهم نباشند.
قابل بازیابی
پردازنده می تواند نظم را بازیابی کند و به کاربر اجازه دهد تا به خطاهای برنامه کنترل پاسخ دهد.
غیر قابل بازیابی
پردازنده نمی تواند نظم را بازگرداند و به کاربر اجازه می دهد تا به خطاهای برنامه کنترل پاسخ دهد.
شرایط مهم
- وضعیت Faults: خطا یا پیش فرضی که در کامپیوتر یا پی ال سی رخ می دهد.
- در CPU: واحد پردازش مرکزی
- وضعیت تشخیص: تشخیص و جداسازی یک خطا
اسکن پردازنده معمولی
اسکن یک چرخه کامل از یک پی ال سی است که ورودی ها را بررسی می کند، سپس برنامه را اجرا می کند و سپس وضعیت خروجی را به روز می کند.
یک برنامه کامل می تواند شامل هزاران ورودی و خروجی باشد که باید در حین اجرای برنامه ارزیابی و اسکن شوند.
اغلب، پردازنده تمام ورودی های خود را اسکن می کند و سپس خروجی های خود را به روز می کند. سپس، پردازنده منطق نردبانی را ارزیابی می کند. تغییرات ایجاد شده در طول اسکن برنامه تا به روز رسانی ورودی/خروجی بعدی موثر نخواهد بود.
اسکن کامل برنامه ممکن است تنها میلی ثانیه طول بکشد.
بحث و درک زمان اسکن
چرخه اسکن برنامه:
همه ورودیها را میخواند، خروجیها را با توجه به مقادیر ورودی، انرژی میدهد یا غیرفعال میکند. شامل اسکن ورودی، اسکن برنامه، اسکن خروجی و وظایف خانه داری است.
از آنجایی که ورودی ها می توانند در هر زمانی تغییر کنند، پردازنده این چرخه را تا زمانی که پی ال سی در حالت RUN قرار دارد، تکرار می کند.
زمان اسکن:
زمان لازم برای خواندن همه ورودی ها، اجرای برنامه کنترل و آپلود وضعیت ورودی و خروجی محلی و راه دور است.
زمان مورد نیاز برای فعال سازی یک خروجی که توسط منطق برنامه ریزی شده کنترل می شود. اندازه گیری سرعت پاسخ پی ال سی را ارائه می دهد.
نشان میدهد که کنترلکننده چقدر سریع میتواند به تغییرات ورودیها واکنش نشان دهد. معمولاً بین 1 تا 20 میلیثانیه متغیر است. بنابراین، تغییرات سیگنال ورودی که سریعتر از زمان اسکن اتفاق میافتد، ممکن است هرگز توسط پردازنده شناسایی نشود.
به همین دلیل می توان از ماژول های ورودی/خروجی عملکرد ویژه استفاده کرد.
نتیجه
CPU برنامه پی ال سی را اجرا می کند. علاوه بر اجرای برنامه پی ال سی، CPU با سایر اجزای واحد ارتباط برقرار می کند. CPU جایی است که ریزپردازنده را پیدا خواهید کرد که مسئول کدگذاری، رمزگشایی و محاسبه داده ها است.
حافظه ROM فقط خواندنی است. برای ذخیره برنامه ها و پارامترهایی که نباید تغییر داده شوند استفاده می شود. جایی است که برنامه عملیاتی پی ال سی در آن ذخیره می شود.
حافظه RAM یک حافظه با دسترسی تصادفی است. RAM قابل نوشتن و خواندن است. اطلاعات موجود در RAM قابل تغییر است. RAM جایی است که برنامه کاربر در آن ذخیره می شود. اطلاعات موجود در RAM ممکن است در هنگام قطع برق از بین برود. در صورت قطع برق، از باتری برای ذخیره اطلاعات RAM استفاده می شود.
حافظه EAPROM یک حافظه فقط خواندنی قابل برنامه ریزی الکترونیکی قابل تغییر است. اطلاعات موجود در EAPROM به دلیل قطع برق از بین نمی رود. EAPROM برای ذخیره اطلاعات کاربر بدون نیاز به برق خارجی استفاده می شود. به دستگاه Roku خود یا چیزی مشابه فکر کنید. میتوانید آن را از برق جدا کنید. آن را در جایی ذخیره کنید، ماهها بعد برگردید، دوباره آن را وصل کنید و استفاده کنید. همه موارد دلخواه و برنامه های کاربردی شما هنوز وجود دارند و آماده کار هستند.
سیستم های ورودی/خروجی
سیستم ورودی/خروجی پی ال سی سیستمی است که اطلاعات جدید را از منابع خارجی می پذیرد و عملکرد جدیدی را در قالب یک خروجی ایجاد می کند.
سیستم عامل در مقابل برنامه کاربر
در دنیای برنامه نویسی پی ال سی، اغلب می شنوید که CPU دو نوع برنامه مختلف را اجرا می کند: سیستم عامل و برنامه کاربر، بیایید به تمایزات اصلی بین این دو نگاهی بیندازیم.
سیستم عامل
سیستم عامل (OS) یک پی ال سی شامل وظایف و برنامه هایی است که برای اجرای خودکار طراحی شده اند، به این معنی که برای عملکرد به دستورات مستقیم کاربر نیاز ندارند.
تمام توابع، توالی ها و عملیات CPU را که با یک کار کنترلی خاص مرتبط نیستند، سازماندهی می کند. وظایف کلیدی سیستم عامل عبارتند از:
- به روز رسانی و خروجی جداول تصویر پردازش I/O
- اجرای برنامه کاربر
- مدیریت مناطق حافظه
- تشخیص و تماس وقفه ها
- ایجاد ارتباط با دستگاه های قابل برنامه ریزی
برنامه کاربر
برنامه کاربر ترکیبی از عملکردهای مختلفی است که یک پی ال سی برای پردازش یک کار خودکار معین به آن نیاز دارد. به عبارت دیگر، این بخشی از پی ال سی است که به اپراتورها اجازه می دهد تا خروجی های مورد نظر خود را که در حافظه داخلی پی ال سی ذخیره می شود، دیکته کنند.
اگرچه این برنامه مسئول عملکردهای قابل مشاهده تر است، اما برنامه کاربر با سیستم عامل پی ال سی کار می کند.
برنامه نویسی پی ال سی
یکی از راههای رایج برای برنامهریزی، اصلاح یا عیبیابی پی ال سی از طریق یک دستگاه مبتنی بر رایانه شخصی در ارتباط با نرمافزار سازنده است. همچنین از دستگاه های دستی اختصاصی استفاده می شود که از طریق کابل به پی ال سی متصل شده اند.
در حالی که یک دستگاه دستی اغلب به دلیل قابل حمل بودن و راحتی ترجیح داده می شود، ممکن است فاقد صفحه کلید سنتی باشد و قابلیت محدودی داشته باشد. از سوی دیگر، اگرچه یک دستگاه PC کمی حجیمتر است. اما معمولاً از قدرت پردازش قویتری برخوردار است. به عنوان مثال به کاربران اجازه می دهد تا علاوه بر ویرایش، نظارت، تشخیص و عیب یابی برنامه، برنامه را در حالت آنلاین یا آفلاین اجرا کنند.
صرف نظر از سیستم، می توانید از لپ تاپ یا دستگاه دستی خود برای ورود به برنامه پی ال سی استفاده کنید. از آنجا می توانید کد را ویرایش کرده و به CPU منتقل کنید.
سپس دستگاه برنامه نویسی خود را جدا کنید. زیرا کد اکنون در داخل CPU ذخیره می شود، جایی که می تواند عملیات بقیه واحد را راهنمایی و کنترل کند.
مقدمه ای بر برنامه نویسی نردبانی
هنگام بحث در مورد اصول برنامه نویسی پی ال سی، ممکن است اصطلاح “برنامه نویسی نردبانی” را بشنوید. این یعنی چی؟
دو دسته اصلی از زبان های برنامه نویسی پی ال سی وجود دارد. زبان های خاص مورد استفاده بسته به سازنده متفاوت خواهد بود. در حالی که برخی زبانهای تخصصی خود را دارند، زبانهای استاندارد در یکی از دو دسته قرار میگیرند: زبان متنی یا زبان گرافیکی
زبان متنی شامل:
- فهرست دستورالعمل ها (IL)
- متن ساختاریافته (ST)
زبان گرافیکی شامل:
- نمودارهای نردبانی (LD)
- نمودار توابع متوالی (SFC)
- نمودار بلوک تابع (FBD)
در بیشتر موارد کاربران زبانهای گرافیکی را به زبانهای مبتنی بر متن ترجیح میدهند، زیرا سادهتر و راحتتر هستند. در این دسته نمودارهای نردبانی برای سهولت استفاده غالب هستند.
اکنون، تعداد نمادهای موجود در طول زمان افزایش یافته است که منجر به عملکردهای پیشرفته و متنوعتر میشود. پی ال سی برای شبیهسازی کنترلهای منطقی رله در دنیای واقعی به این نمادها متکی است و آنها را از طریق خطوط مدار و قدرت برای هدایت جریان الکتریکی به هم متصل میکند.
برنامهنویسی نردبانی که اغلب منطق نردبانی نامیده میشود، نام خود را به این دلیل به دست میآورد که کدی که به دست میآید یک نردبان را تشکیل میدهد که از نمادهای زیر تشکیل شده است: - یک ریل برق در سمت چپ
- یک ریل برق در سمت راست
- مدارهای جداگانه (“پله”) که ریل های برق چپ و راست را به هم متصل می کند.
سیستم های منطق مشترک
در حالی که منطق نردبانی زبان کاملی از نمادها است. برخی از آنها را بیشتر از بقیه خواهید دید به خصوص در نمودارها بیایید چند مورد را مرور کنیم.
- نمادهای کنتاکت
اینها در دو نوع هستند: “به طور معمول باز” (NO) و “به طور معمول بسته” (NC). کلید چراغ نمونه ای از مدار NO است. زیرا خاموش می ماند مگر اینکه کسی آن را روشن کند. از دیگر کاربردهای نماد NO می توان به دکمه های پاور و دیگر برنامه نویس های داخلی اشاره کرد.
از سوی دیگر یک کنتاکت NC نشان دهنده مداری است که تا زمانی که یک ورودی باعث خاموش شدن شود، فعال باقی می ماند. موارد استفاده برای نماد NC شامل ویژگی های ایمن خرابی، نظارت بر حرارت و دکمه های “توقف” است. - نماد خروجی
نماد خروجی یک نمایش رایج برای علائم هشدار دهنده، چراغ های نشانگر و کنتاکتورهای موتور است. خروجی هر کدام با روشن شدن ورودی مربوطه روشن می شود. - کنتاکت های لبه مثبت تک شات
این خروجی ها در صورتی روشن می شوند که یک شرط معین از “نادرست” به “درست” در طول مدت زمانی که طول می کشد تا پی ال سی یک اسکن را کامل کند، تغییر کند. اغلب برای شمارنده ها و دستورات ریاضی استفاده می شود. - تأخیرهای تایمر (روشن/خاموش)
دستورالعملهای تایمر امکان رویدادهای با تأخیر یا بدون تأخیر را فراهم میکنند. یک سیستم تأخیر روشن تایمر یک تایمر را شروع می کند تا با روشن شدن ورودی پی ال سی، سیستم را روشن کند و به آن زمان می دهد تا قبل از عملیات گرم شود. این برای به تاخیر انداختن صداهای آژیر و تسهیل تاخیرهای شروع توالی به خوبی کار می کند.
سیستم تأخیر خاموش تایمر این تأخیر را در پایان کار قرار می دهد، و اجازه می دهد تا زمانی بین عملیات خاموش شدن و خاموش شدن واقعی سیستم بگذرد. این برای نمایشگرهای خودکار و هر ماشینی که مستعد خاموش شدن تصادفی است ایده آل است. - مقایسه ها
این سیستم تعیین می کند که آیا یک مقدار داده شده بزرگتر، کمتر یا مساوی با مقدار دیگری است یا خیر یک کاربرد در سیستم های بچینگ است که از مقایسه ها برای اطمینان از وزن یکسان همه اجزای بسته استفاده می کند. - ماشین حساب ها
دستورالعملها یا ماشینحسابهای ریاضی، توابع جمع و تفریق ساده را فعال میکنند و به پی ال سی ها اجازه میدهند دادههایی مانند سرعت موتور را محاسبه کنند. علاوه بر این توابع عددی معمولی، آنها همچنین می توانند توابع ماورایی پیچیده تری مانند ریشه های مربع، و همچنین سینوس مثلثاتی، کسینوس و مماس را به همراه اشکال معکوس آنها (سینوس قوس، کسینوس قوس و مماس قوس) نیرو دهند. - دستورالعمل های ویژه
دستورالعملهای پیشرفته ممکن است شامل جهتهای ارتباطی، حلقههای PID، دنبالههای درام، ثبتکنندههای شیفت، ژنراتورهای سطح شیبدار و موارد دیگر باشد. - بلوک های تابعی
هنگام ساختن یک نردبان پی ال سی، کاربران می توانند بلوک های عملکردی را با دستورالعمل های پیچیده تر ترکیب کنند. علاوه بر بهبود زمان اسکن، این بلوک ها می توانند جایگزین تمام اجزای فیزیکی سیستم شما مانند تایمرهای مکانیکی با سیم سخت شوند. یک مثال شامل:
منطق And/Or Logic
با استفاده از بلوک های تابع، می توانید پله های نردبان خود را با ترکیب منطق “AND” متراکم کنید که به احتراق دو یا چند ورودی برای راه اندازی یک خروجی نیاز دارد. به عنوان مثال یک تکنسین باید دو دکمه را فشار دهد تا دستگاه مشخصی روشن شود.
شما همچنین می توانید همین مفهوم را برای منطق “OR” اعمال کنید. اگر منطق «AND» شبیه یک مدار سری باشد، منطق «OR» همتای آن یا یک مدار موازی است. در بلوک های تابع برای نیاز به یک ورودی یا دیگری استفاده می شود.
این آن را برای ماشینهایی که بیش از یک صفحه کنترل با کلید روشن/خاموش در دو طرف دارند ایدهآل میکند. با منطق “OR”، کاربران می توانند هر یک از سوئیچ ها را فشار دهند تا به همان اثر دست یابند.
ایجاد یک برنامه پی ال سی
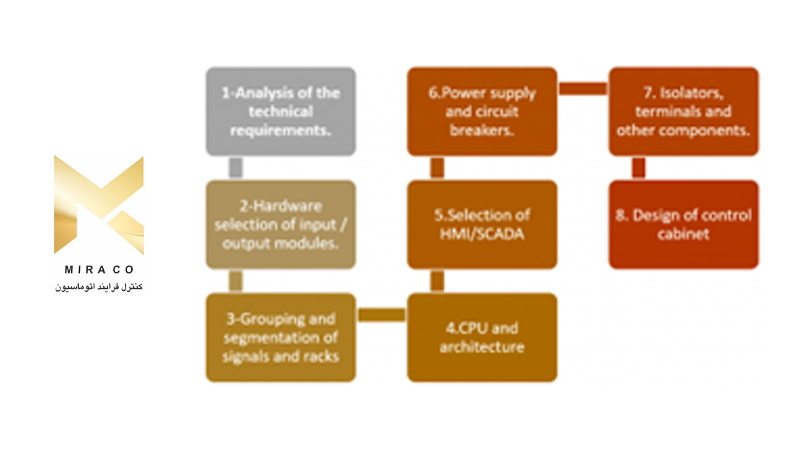
اگر میخواهید از منطق نردبانی برای ایجاد یک برنامه پی ال سی استفاده کنید، بیایید مراحل را مرور کنیم.
- توابع برنامه را تعیین کنید.
ابتدا مشخص کنید که می خواهید برنامه شما چه کاری انجام دهد.
آیا می خواهید کلید چراغ را روشن کنید؟ در مورد خاموش کردن تسمه نقاله یا فعال کردن دستگاه برای توقف هر سه دقیقه چطور؟ هیچ پاسخ درست یا غلطی وجود ندارد، اما قبل از شروع به یک نمای واضح از عملکرد خروجی نیاز دارید. - فهرست شرایط برنامه
در مرحله بعد تمام شرایطی که در برنامه شما اجرا می شود را فهرست کنید. با استفاده از مثال کلید چراغ، یک شرط این است که وقتی کلید را به سمت بالا میچرخانید، چراغ روشن شود. سپس هنگامی که آن را به سمت پایین می چرخانید، چراغ خاموش می شود.
یک فلوچارت با ارجاع به این شرایط برای نمایش بصری ایجاد کنید. - نرم افزار خود را پیکربندی کنید.
اکنون، شما آماده هستید تا دستگاه دستی یا مبتنی بر رایانه شخصی خود را باز کنید و نرم افزار برنامه نویسی خود را بارگیری کنید. آن را با تنظیمات مورد نیاز پیکربندی کنید و زبان خود را روی “Lader Logic language” تنظیم کنید. در نهایت، پردازنده سخت افزاری مناسب را انتخاب کنید و نام برنامه جدید خود را انتخاب کنید. - پله های خود را اضافه کنید.
با نصب ریل های برق، می توانید برنامه ریزی پله های نردبان خود را شروع کنید. تعداد پله های لازم خود را به برنامه اضافه کنید و به هر ورودی و خروجی دقت کنید. - برای خطاها اسکن کنید.
اسکن کردن برنامه برای یافتن خطاها در این مقطع ضروری است، به جای اینکه بعداً به عقب برگردید، اکنون آنها را شناسایی کنید. - برنامه را دانلود کنید.
آخرین مرحله شما این است که برنامه را در پی ال سی خود دانلود کنید. آن را در حافظه سیستم دانلود کنید. هنگامی که انتقال انجام شد، می توانید دستگاه برنامه نویسی خود را جدا کنید.
نگاهی جامع به اصول پی ال سی
با ادامه پیشرفت سیستم های کنترل صنعتی از نظر پیچیدگی و عملکرد، پی ال سی ها حتی چند وجهی و متنوع تر خواهند شد. در حالی که این راهنمای اصول اولیه پی ال سی یک شروع مفید است، مهم است که در بالای این روندها بمانید تا مزیت رقابتی خود را حفظ کنید.
[fusion_person name=”تیم تولیدمحتوای میراکنترل” title=”میراکنترل؛کنترل فرایند اتوماسیون” picture=”https://miracontroller.com/wp-content/uploads/2021/02/icons8-manager-80.png” picture_id=”21002|full” pic_link=”” linktarget=”_self” pic_style=”” pic_style_blur=”” pic_style_color=”” pic_bordersize=”” pic_bordercolor=”” pic_borderradius=”” hover_type=”none” background_color=”” content_alignment=”center” icon_position=”bottom” social_icon_boxed=”” social_icon_boxed_radius=”” social_icon_color_type=”” social_icon_colors=”” social_icon_boxed_colors=”” social_icon_tooltip=”left” blogger=”” deviantart=”” digg=”” dribbble=”” dropbox=”” facebook=”” flickr=”” forrst=”” instagram=”” linkedin=”” myspace=”” paypal=”” pinterest=”” reddit=”” rss=”” skype=”” soundcloud=”” spotify=”” tumblr=”” twitter=”” vimeo=”” vk=”” whatsapp=”https://wa.me/989125376505″ xing=”” yahoo=”” yelp=”” youtube=”” email=”info@miracontroller.ir” show_custom=”no” hide_on_mobile=”small-visibility,medium-visibility,large-visibility” class=”” id=””]تمامی محتوای قرارگرفته در این سایت نتیجه زحمات یکایک افراد تیم تولیدمحتوای میراکنترل است. استفاده از این مطالب با ذکر منبع بلامانع می باشد.[/fusion_person][/fusion_builder_column][/fusion_builder_row][/fusion_builder_container]