
در این مقاله سیستم تناسبی با دو تاخیر زمانی را بررسی خواهیم کرد.
🔹ارائه دهنده: تیم تولید محتوای میراکنترل
این سیستم به اختصار سیستم P-T2 نامیده می شود.
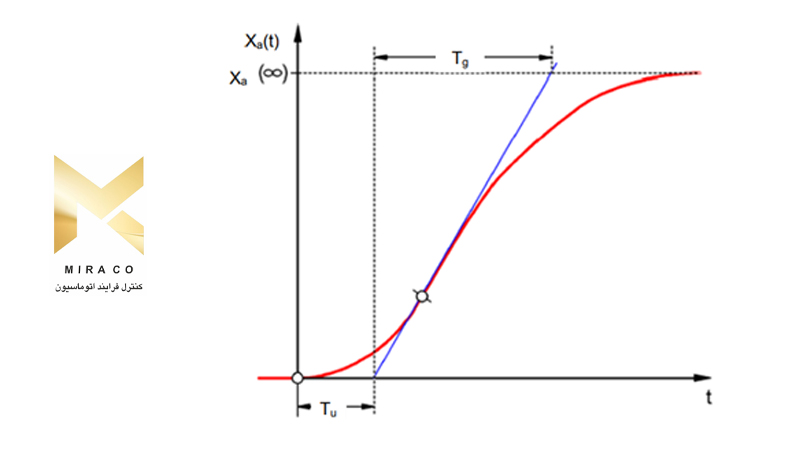
Tu: زمان تاخیر Tg: زمان جبران
این سیستم از طریق اتصال سری بدون واکنش دو سیستم P-T1 که دارای ثابت های زمانی TS1 و TS2 هستند، تولید می شود.
قابلیت کنترل سیستم های P-Tn:
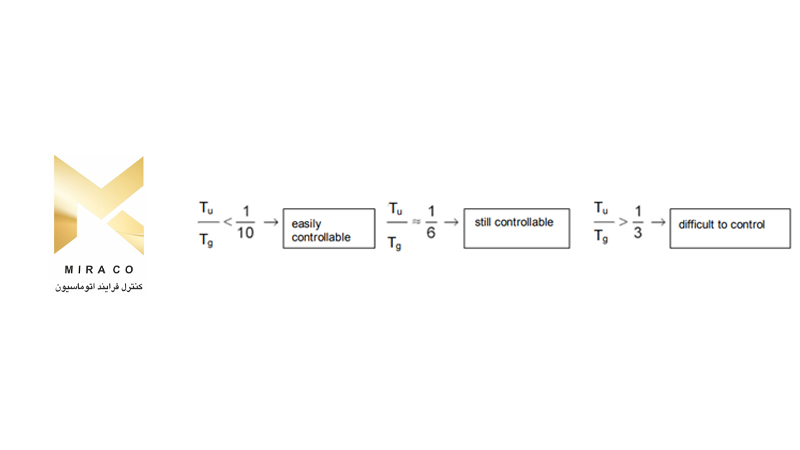
با افزایش نسبت Tu/Tg، سیستم کمتر قابل کنترل می شود.
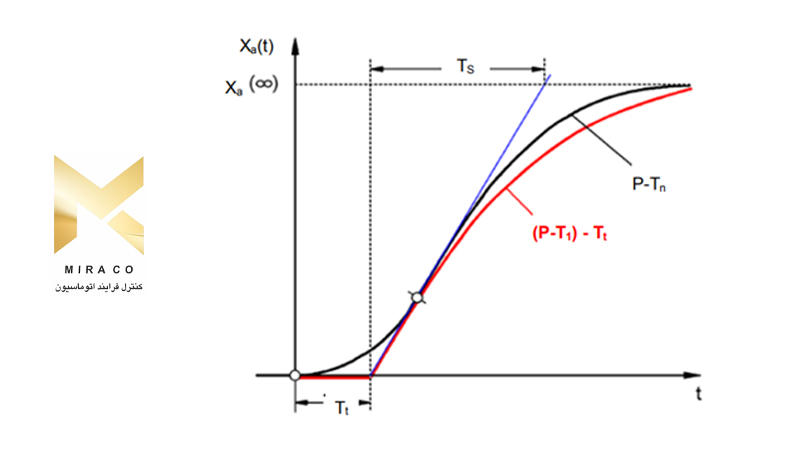
سیستم متناسب با n تاخیر زمانی :
این سیستم کنترل شده به اختصار سیستم P-Tn نامیده می شود.
پاسخ زمانی با یک معادله دیفرانسیل مرتبه n توصیف می شود. مشخصه پاسخ گامی مشابه با سیستم P-T2 است. پاسخ زمانی توسط Tu و Tg توصیف شده است.
جایگزین: یک جایگزین تقریبی برای سیستم با تاخیرهای زیاد، اتصال سری یک سیستم P-T1 با سیستم زمان تلف شده است.
سیستم های بدون خود تنظیمی (Systems without self-regulation)
این سیستم کنترل شده به اختصار سیستم I نامیده می شود.
پس از یک اختلال، متغیر کنترل شده بدون تلاش برای یک مقدار نهایی ثابت به افزایش پیوسته ادامه می دهد.
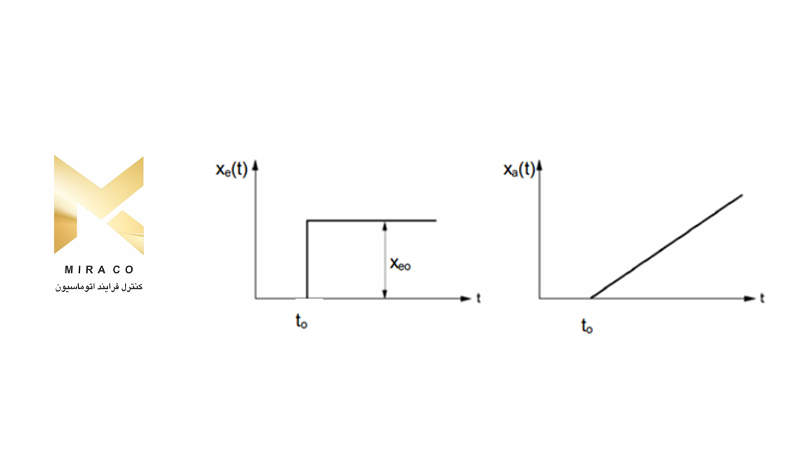
مثال: کنترل سطح
برای مخزن با خروجی تخلیه که دبی ورودی و خروجی آن یکسان است، ارتفاع پر شدن ثابتی وجود دارد. اگر نرخ جریان ورودی یا خروجی تغییر کند، سطح مایع افزایش یا کاهش می یابد. با افزایش اختلاف بین نرخ جریان ورودی و خروجی، سطح سریعتر تغییر می کند.
از این مثال مشخص می شود که عملاً عمل انتگرال در اکثر موارد حدی دارد. متغیر کنترل شده تنها تا زمانی که به یک مقدار حد ذاتی سیستم برسد افزایش یا کاهش می یابد. یک مخزن از بین می رود یا خشک می شود، فشار به حداکثر یا حداقل سیستم می رسد و غیره.
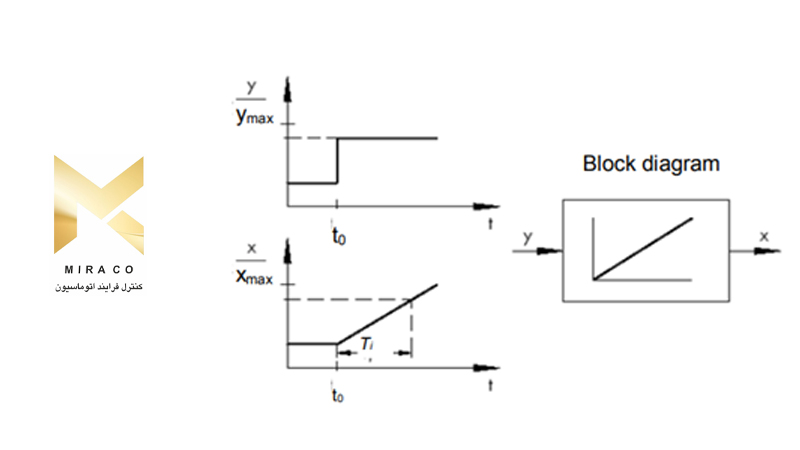
شکل پاسخ زمانی یک سیستم I را به تغییر مرحله ای در متغیر ورودی و همچنین بلاک دیاگرام مشتق شده نشان می دهد:
انواع اصلی کنترلرهای پیوسته
کنترلرهای گسسته که فقط یک یا دو متغیر دستکاری شده را روشن و خاموش می کنند از مزیت سادگی برخوردارند. هر دو خود کنترل کننده و اکچویتور و عنصر کنترل نهایی ساده تر هستند و بنابراین هزینه کمتری نسبت به کنترل کننده های پیوسته دارند.
با این حال، کنترل کننده های گسسته دارای معایبی هستند. به عنوان مثال، هنگامی که بارهای بزرگ مانند موتورهای الکتریکی بزرگ یا واحدهای خنک کننده باید سوئیچ شوند، ممکن است پیک بار بالا در هنگام کلید زدن اتفاق بیفتد و به عنوان مثال پاور ساپلای را اضافه بار کند.
به همین دلیل، اینها اغلب بین «خاموش» و «روشن» سوئیچ نمیکنند، بلکه بین قدرت کامل («بار کامل») و توان بسیار کمتر اکچویتور یا عنصر کنترل نهایی («بار پایه») تغییر میکنند. با این حال، حتی با این بهبود، یک کنترل حلقه بسته گسسته برای برنامه های متعدد نامناسب است. یک خودرو را در نظر بگیرید موتوری که سرعت آن به طور محتاطانه کنترل می شود. در این صورت هیچ چیزی بین شیر آزاد و گاز کامل وجود نخواهد داشت.
جدا از این واقعیت که احتمالاً انتقال نیروها از یک گاز ناگهانی تمام گاز به جاده از طریق لاستیک ها غیرممکن خواهد بود، چنین وسیله نقلیه ای احتمالاً برای ترافیک جاده ای نامناسب خواهد بود.
بنابراین برای چنین کاربردهایی از کنترلرهای پیوسته استفاده می شود. از نظر تئوری، به سختی هیچ محدودیتی برای رابطه ریاضی که عنصر کنترل کننده بین خطای سیستم و متغیر خروجی کنترلر وجود ندارد. با این حال، در عمل، سه نوع پایه کلاسیک متمایز می شوند. در ادامه این موارد با جزئیات بیشتر توضیح داده خواهد شد.
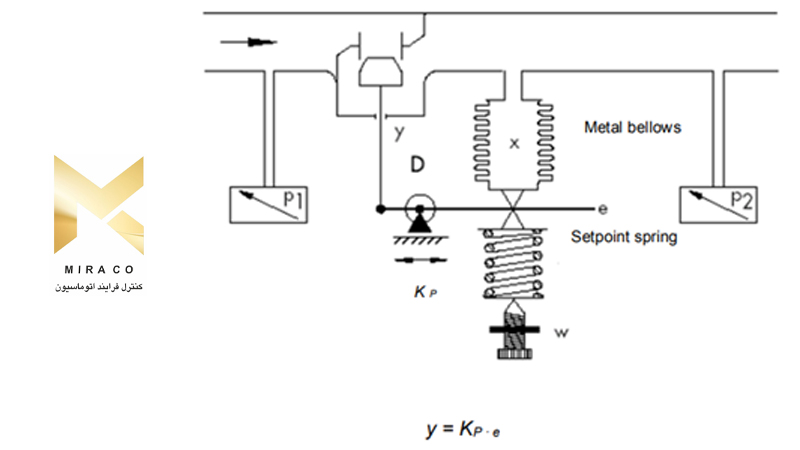
کنترل کننده تناسبی (کنترل کننده P)
متغیر دستکاری شده y یک کنترلر P با خطای اندازه گیری شده e متناسب است. از این می توان نتیجه گرفت که یک کنترل کننده P به هر انحراف بدون تاخیر واکنش نشان می دهد و تنها در صورت انحراف سیستم، یک متغیر دستکاری شده تولید می کند.
کنترل کننده فشار متناسب که در شکل نشان داده شده است، نیروی FS فنر نقطه تنظیم را با نیروی FB ایجاد شده در انتهای فلزی الاستیک توسط فشار p2 مقایسه می کند. هنگامی که نیروها از تعادل خارج می شوند، اهرم حول نقطه D می چرخد. این وضعیت موقعیت پلاگ شیر را تغییر می دهد – و بنابراین، فشار p2 باید کنترل شود – تا زمانی که تعادل جدیدی از نیروها برقرار شود.
رفتار دینامیکی کنترلر P پس از تغییر مرحله ای در متغیر خطا در شکل نشان داده شده است. دامنه متغیر دستکاری شده y با خطای e و ضریب عمل متناسب Kp تعیین می شود:
برای کوچک نگه داشتن انحراف کنترل تا حد امکان، باید یک ضریب عمل متناسب بزرگ انتخاب شود. افزایش ضریب باعث می شود کنترل کننده سریعتر واکنش نشان دهد، اما اگر مقدار بسیار زیاد است، خطر بیش از حد و تمایل بزرگ “شکار” کنترلر وجود دارد .
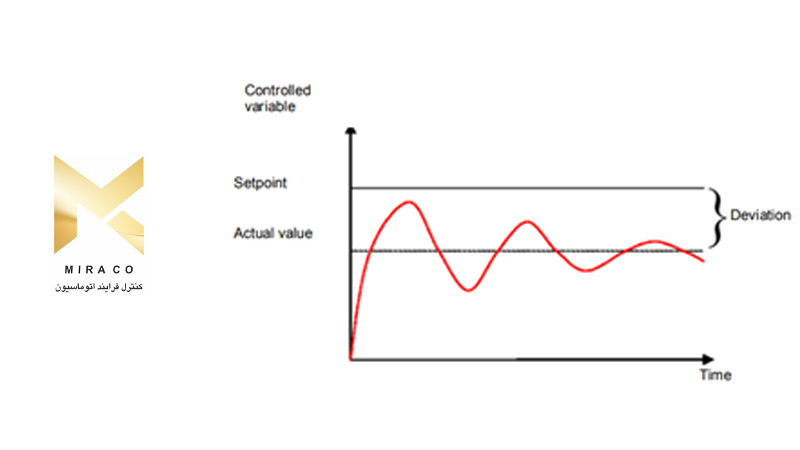
پاسخ کنترل کننده P را در نمودار مشاهده می کنید.
مزایای این نوع کنترلر از یک طرف در سادگی آن (در ساده ترین حالت، تنها با یک مقاومت به صورت الکترونیکی قابل پیاده سازی است) و از طرف دیگر در واکنش بسیار سریع آن نسبت به سایر انواع کنترلر نهفته است.
نقطه ضعف اصلی کنترلر P انحراف دائمی سیستم آن است. به این معنی است که نقطه تنظیم حتی در دراز مدت هرگز به طور کامل به دست نمی آید. این نقطه ضعف و همچنین سرعت پاسخ نه چندان ایده آل را نمی توان به میزان رضایت بخشی از طریق یک ضریب عمل متناسب بزرگتر به حداقل رساند، زیرا این امر منجر به واکنش بیش از حد کنترل کننده می شود. در بدترین حالت، کنترل کننده وارد یک نوسان دائمی می شود که در آن متغیر کنترل شده به طور دوره ای توسط خود کنترل کننده به جای متغیر دستکاری شده از نقطه تنظیم دور می شود.
مشکل انحراف کنترل دائمی به بهترین وجه توسط یک کنترل کننده انتگرال اضافی حل می شود.
سفارش و یا خرید انواع محصولات ابزار دقیق و همچنین کسب اطلاعات بیشتر و مشاوره رایگان با شماره های 88341674-021 | 88341172-021 تماس حاصل فرمایید.
[fusion_person name=”تیم تولیدمحتوای میراکنترل” title=”میراکنترل؛کنترل فرایند اتوماسیون” picture=”https://miracontroller.com/wp-content/uploads/2021/02/icons8-manager-80.png” picture_id=”21002|full” pic_link=”” linktarget=”_self” pic_style=”” pic_style_blur=”” pic_style_color=”” pic_bordersize=”” pic_bordercolor=”” pic_borderradius=”” hover_type=”none” background_color=”” content_alignment=”center” icon_position=”bottom” social_icon_boxed=”” social_icon_boxed_radius=”” social_icon_color_type=”” social_icon_colors=”” social_icon_boxed_colors=”” social_icon_tooltip=”left” blogger=”” deviantart=”” digg=”” dribbble=”” dropbox=”” facebook=”” flickr=”” forrst=”” instagram=”” linkedin=”” myspace=”” paypal=”” pinterest=”” reddit=”” rss=”” skype=”” soundcloud=”” spotify=”” tumblr=”” twitter=”” vimeo=”” vk=”” whatsapp=”https://wa.me/989125376505″ xing=”” yahoo=”” yelp=”” youtube=”” email=”info@miracontroller.ir” show_custom=”no” hide_on_mobile=”small-visibility,medium-visibility,large-visibility” class=”” id=””]تمامی محتوای قرارگرفته در این سایت نتیجه زحمات یکایک افراد تیم تولیدمحتوای میراکنترل است. استفاده از این مطالب با ذکر منبع بلامانع می باشد.[/fusion_person][/fusion_builder_column][/fusion_builder_row][/fusion_builder_container]