



در این مقاله در مورد Range Finders و اصل آن بحث خواهیم کرد. و همچنین سه نوع اصلی فاصله یاب در دنیای امروز و عملکرد آنها را بررسی می کنیم.
🔹ارائه دهنده: تیم تولید محتوای میراکنترل
محدوده یاب
فاصله یاب ها فقط شبیه سنسور های Proximity هستند، اما یک تفاوت عمده این است که سنسور Proximity برای تشخیص اشیاء در فاصله کوتاه استفاده می شود در حالی که Range یاب برای یافتن فواصل بزرگتر برای شناسایی موانع و نقشه برداری از سطح اشیاء استفاده می شود.
منظور از محدوده یاب، ارائه اطلاعات پیشرفته به سیستم است. عمدتاً محدوده یاب ها از نور برای تشخیص جسم استفاده می کنند، ممکن است نور مرئی، نور مادون قرمز، لیزر یا اولتراسونیک باشد.
مسافت یاب ها از دو روش رایج اندازه گیری استفاده می کنند. آن ها هستند
- مثلث سازی
- زمان پرواز.
روش مثلث بندی
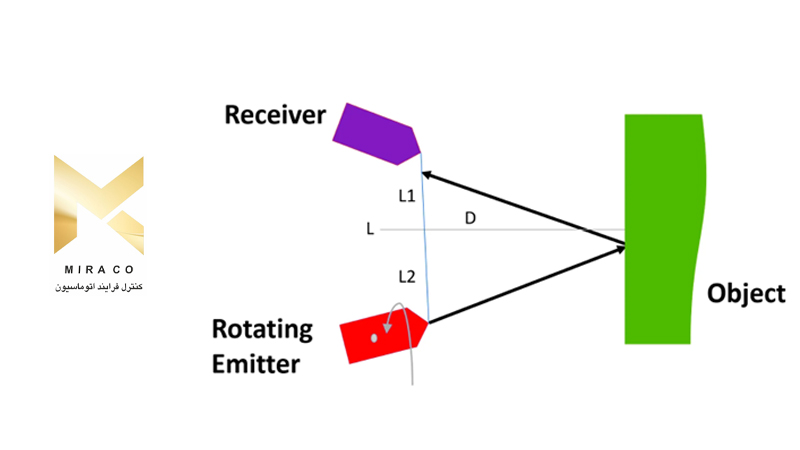
مثلث سازی شامل روشن کردن جسم با یک پرتو نور است که یک نقطه روی جسم را تشکیل می دهد. این نقطه توسط گیرنده ای مانند ردیاب نوری دیده می شود.
عمق جسم از مثلثی که بین گیرنده، منبع نور و نقطه روی جسم تشکیل شده است محاسبه می شود.
این گیرنده تنها زمانی نقطه روی جسم را تشخیص می دهد که امیتر در یک زاویه خاص باشد که برای محاسبه برد استفاده می شود.
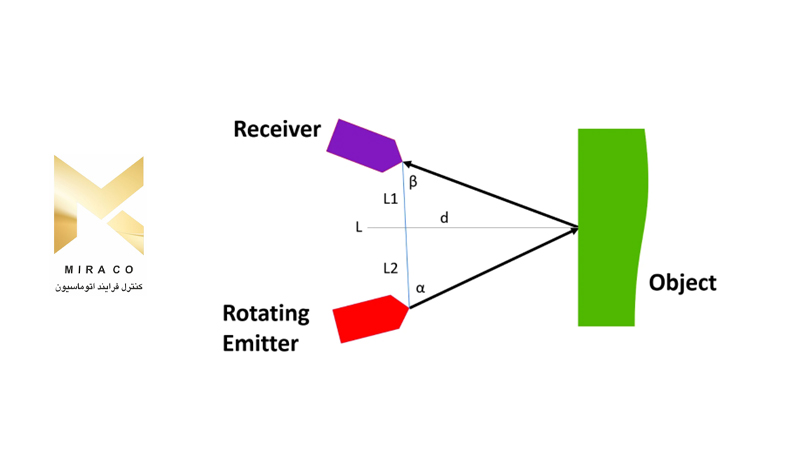
با جایگزینی و دستکاری مقادیر می توانیم عمق شی را بدست آوریم.
tan α = d/ L2
tan β = d / L1
می توانیم L=L1 + L2 را بگیریم
در نهایت، عمق را می توان با d = L tan α tan β / (tan β + tan α) محاسبه کرد.
روش زمان پرواز
محدوده زمان پرواز شامل ارسال سیگنالی از فرستنده است که از یک شی به عقب باز می گردد و توسط گیرنده دریافت می شود.
در این حالت، فاصله بین جسم و سنسور نصف مسافت طی شده توسط سیگنال است. با دانستن سرعت سفر می توان زمان پرواز اندازه گیری سیگنال را محاسبه کرد.
این اندازه گیری زمان باید بسیار سریع باشد تا دقیق باشد. برای اندازه گیری فاصله کمتر، طول موج سیگنال باید بسیار کوچک باشد.
انواع محدوده یاب
ما از سه روش اصلی برای یافتن محدوده شی استفاده می کنیم. آن ها هستند:
- محدوده یاب اولتراسونیک
- محدوده یاب مبتنی بر نور
- سیستم های موقعیت یابی جهانی
محدوده یاب اولتراسونیک
سیستم های اولتراسونیک ناهموار، ساده، ارزان هستند و از سیستم های کم مصرف استفاده می کنند. آنها عمدتاً در فوکوس، تشخیص حرکت، ناوبری و اندازهگیری برد استفاده میشوند.
آنها همچنین دارای معایب خاصی هستند که به دلیل طول موج صدا، تغییرات طبیعی دما و سرعت در محیط و در حداکثر دامنه آنها است که توسط جذب انرژی اولتراسوند در محیط محدود می شود.
به طور معمول، دستگاه های اولتراسونیک دارای فرکانس 20 کیلوهرتز تا بالای 2 مگاهرتز هستند. اکثر دستگاه های اولتراسونیک از Time of Flight برای اندازه گیری فاصله جسم استفاده می کنند. که در آن، مبدل پالس اولتراسوند با فرکانس بالا را منتشر می کند که زمانی که با جدایی در محیط مواجه می شود و گیرنده ای که سیگنال منعکس شده را دریافت می کند، منعکس می شود.
فاصله بین مبدل و جسم نصف مسافت طی شده است که برابر است با زمان پرواز ضربدر سرعت صوت. بنابراین، طول موج سیگنال، دقت اندازهگیری زمان، و سرعت صوت، دقت اندازهگیری برد را تعیین میکند.
سرعت صوت در یک محیط به فرکانس موج، چگالی و دمای محیط بستگی دارد. برای افزایش دقت سیستم اندازه گیری، یک نوار کالیبراسیون در جلوی مبدل قرار می گیرد که قرار است سیستم را برای تغییر دما کالیبره کند. این روش کالیبراسیون تنها زمانی مؤثر خواهد بود که دمای محیط در طول مسافت طی شده یکنواخت باشد.
دقت اندازه گیری زمان نیز عامل مهمی برای اندازه گیری دقیق فاصله است. بدترین خطا در اندازه گیری زمان ± 1/2 طول موج است اگر ساعت به محض دریافت سیگنال برگشتی در حداقل آستانه متوقف شود. بنابراین برای دقت بهتر باید از دستگاه های اولتراسوند فرکانس بالاتر استفاده شود.
به عنوان مثال، در 200 کیلوهرتز، طول موج ها حدود 0.067 اینچ (تقریبا) خواهد بود که حداقل دقت در بدترین حالت 0.034 اینچ را به همراه دارد. برای افزایش وضوح و دقت دستگاه های اولتراسونیک باید از روش های همبستگی، مقایسه فاز، فرکانس و مدولاسیون و یکپارچه سازی سیگنال استفاده شود. اگرچه فرکانسهای بالاتر وضوح بهتری را ارائه میدهند، اما بسیار سریعتر از سیگنالهای فرکانس پایینتر تضعیف میشوند که دامنه آنها را به شدت محدود میکند.
نویز پس زمینه یکی دیگر از مشکلات سنسوره یا ترانسمیتر جریان اولتراسونیک است. بسیاری از عملیاتها و تکنیکهای مختلف صنعتی و تولیدی، امواج صوتی حاوی امواج فراصوت تا 100 کیلوهرتز تولید میکنند که میتواند در عملکرد دستگاههای اولتراسونیک اختلال ایجاد کند.
بنابراین برای عملیات صنعتی و تولیدی باید از دستگاه اولتراسونیک با فرکانس بالای 100 کیلوهرتز برای عملکرد بهتر و خوب استفاده کنیم. برای اندازه گیری فاصله، نقشه برداری و تشخیص عیب می توانیم از دستگاه های اولتراسونیک استفاده کنیم.
چک کردن نقطهای فرآیندی است که در آن از اندازهگیری تک نقطهای استفاده میکنیم در حالی که برای نقشهبرداری از تکنیکهای جمعآوری نقاط داده چندگانه استفاده میشود. در روش چند نقطه ای، تعداد زیادی فواصل تا مکان های مختلف روی یک جسم اندازه گیری می شود.
محدوده یاب مبتنی بر نور
برد یاب های مبتنی بر نور (از جمله مادون قرمز و لیزر) فاصله از یک جسم را با استفاده از سه روش مختلف اندازه گیری می کنند. آنها اندازه گیری تاخیر زمانی مستقیم، مدولاسیون دامنه غیرمستقیم و مثلث بندی هستند.
روش اول، اندازهگیری تأخیر زمانی مستقیم، زمان را با همسو کردن یک پرتو نور برای حرکت به یک جسم و برگشت اندازهگیری میکند، مشابه سنسور اولتراسونیک، عمدتاً از نور لیزر برای این کار استفاده میکند زیرا منحرف نمیشود. این روش به شدت به وسایل الکترونیکی با سرعت بالا و وضوح بالا نیاز دارد زیرا باید با سرعت نور (300000 کیلومتر بر ثانیه) در هوا به مدت 30 سانتی متر در 1 ثانیه حرکت کند.
در یک روش غیرمستقیم، تاخیر زمانی با تعدیل یک انفجار طولانی نور با یک موج سینوسی فرکانس پایین و اندازه گیری اختلاف فاز بین نور ساطع شده و نور پس پراکنده اندازه گیری می شود.
این روش با کاهش سرعت موج تا مقیاسهای قابل اندازهگیری با جایگزینی سرعت نور با مدولاسیونهای کمسرعت، از مزایای برد طولانی نورهای لیزری برخوردار است.
مثلث سازی تکنیک رایجی است که در محدوده یابی با استفاده از پرتوهای نور استفاده می شود. این روش نتایج دقیقی را در مسافت های کوتاه تری که در ناوبری با آن مواجه می شود نشان می دهد. این روش در بین این سه روش برای برخوردهای مسافت کوتاه بهترین است.
LIDAR (Light Detection and Ranging) شبیه رادار است اما به جای امواج رادیویی از نور استفاده می کند. در این، یک پرتو نور به سمت هدف عبور می کند و از نور پراکنده برای یافتن برد جسم استفاده می شود. برای جمع آوری اطلاعات پیوسته، هزار پالس نور توسط یک آینه در حال چرخش به صورت پیوسته منعکس می شود.
به عنوان مثال، سیستمی به نام Velodyne Lidar که از مجموعه ای از 64 ساطع کننده لیزر استفاده می کند، هزاران پالس در ثانیه شلیک می کند در حالی که واحد بین 5-15 هرتز می چرخد. این می تواند اطلاعات محیطی را در 360 درجه و ارتفاع 27 درجه با برد 120 متر جمع آوری کند.
سیستم موقعیت یاب جهانی (GPS)
سیستم موقعیت یاب جهانی مبتنی بر سیستم ناوبری رادیویی است که به صورت رایگان در دسترس همه بود. مسیریابی و نقشه برداری به راحتی توسط این سیستم مشخص خواهد شد. ما به راحتی می توانیم موقعیت و زمان جهانی را با این گیرنده GPS تعیین کنیم.
این سیستم شامل 29 ماهواره در مدار زمین، ایستگاه کنترل و نظارت بر روی زمین و گیرنده GPS است. گیرنده از داده های ارسال شده از ماهواره ها برای محاسبه موقعیت خود استفاده می کند. این اطلاعات برای اهداف موقعیت یابی مستقیماً به سیستم کنترل یک موبایل ارسال می شود.
در این روش هر ماهواره در یک بازه زمانی معین، سیگنالی را با اطلاعات مربوط به زمان ارسال سیگنال و مکان ماهواره ارسال می کند. این واحد GPS سیگنال های ارسال شده توسط چهار ماهواره را می خواند و از تفاوت بین زمان فعلی و زمانی که سیگنال ارسال شده است استفاده می کند.
با این کار ماهواره ها می توانند فاصله را محاسبه کنند. هر فاصله یک کره را تشکیل می دهد که در مرکز ماهواره ای است که واحد GPS در آن قرار دارد. محل تقاطع بین این کره ها محل واحد GPS است.
در تئوری، سیگنال های تنها از سه ماهواره باید کافی باشد. واحد GPS باید بتواند موقعیت خود را نسبت به سه ماهواره تعیین کند. با این حال، از آنجایی که سیگنال ها با سرعت نور حرکت می کنند، دقت سیستم تا حد زیادی به دقت ساعت واحد GPS بستگی دارد.
در دنیای مدرن، این GPS را می توان با ربات ها برای موقعیت یابی و ناوبری ادغام کرد. اطلاعات موقعیت به ریزپردازنده وارد می شود که از آن برای تصمیم گیری در مورد اقدامات یا حرکات بعدی استفاده می کند. بیشتر وسایل نقلیه بدون سرنشین و خودروهای الکتریکی از این سیستم برای ناوبری استفاده می کنند. این همچنین به طور گسترده در برنامه های نظامی برای دریافت سیگنال های با کارایی بالا برای بهبود دقت موقعیت استفاده می شود.
برای سفارش و یا خرید انواع محصولات ابزار دقیق و همچنین کسب اطلاعات بیشتر و مشاوره رایگان با شماره های 88341674-021 | 88341172-021 تماس حاصل فرمایید.
منبع: