در این مقاله بطور خلاصه نحوه تبدیل سیگنال ورودی در پوزیشنر را بررسی می کنیم.
🔹ارائه دهنده: تیم تولید محتوای میراکنترل
[fusion_text]
روش های ارسال سیگنال ورودی به پوزیشنر
سیگنال ورودی را می توان به یکی از دو روش به پوزیشنر ارسال کرد :
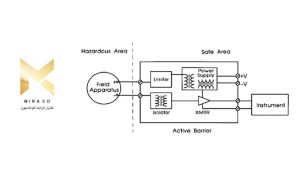
- یک سیگنال پنوماتیک 3–15 psig مستقیماً از کنترلر.
- یک سیگنال الکتریکی از کنترل کننده که توسط کانورتر جریان به پنوماتیک یا کانورتر ولتاژ به پنوماتیک که خارجی یا داخلی به پوزیشنر است به سیگنال پنوماتیک تبدیل می شود.
- سیگنال پنوماتیک باید به حرکت مکانیکی تبدیل شود.
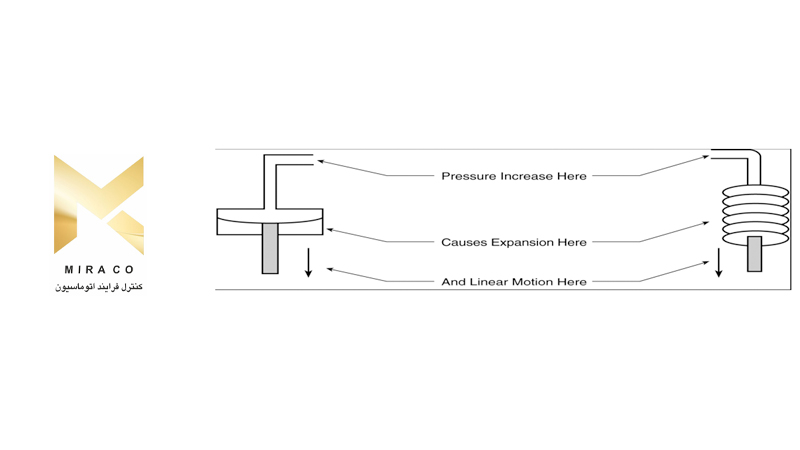
- این فرآیند تبدیل همیشه با یک دیافراگم یا محفظه انتها شروع می شود.
- تغییر فشار به یک حرکت خطی تبدیل می شود.
- اکنون از حرکت خطی مستقیماً برای قرار دادن کنترل ولو در جهت داخل پوزیشنر استفاده می شود، یا برای تعدیل فلپر نازل-فلاپر استفاده می شود.
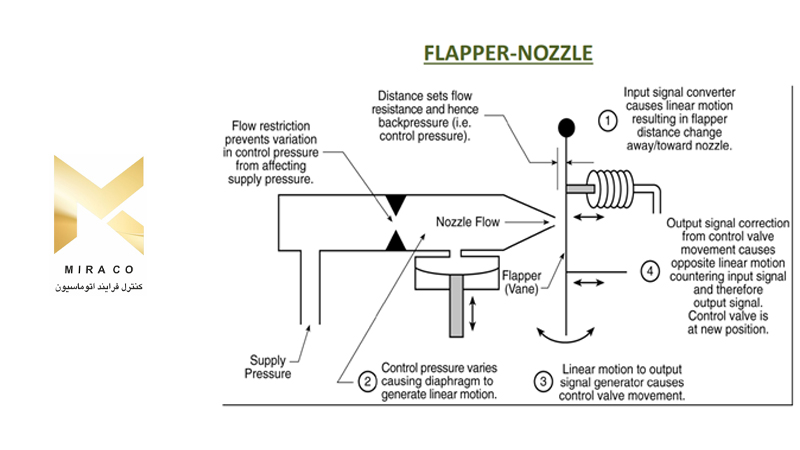
در طول عملیات حالت پایدار، ایر ساپلای از دو محدودیت عبور می کند. اولین محدودیت یک اوریفیس ثابت است تا جریان کافی را برای عملکرد نازل-فلاپ بدون تأثیر بر فشار منبع ایجاد کند.
محدودیت دوم ناشی از حرکت فلپر به سمت/ دور شدن از نازل است. حرکت فلپر به سمت نازل باعث افزایش فشار در محفظه نازل می شود و بالعکس.
به عبارت دیگر، اندازه محدودیت اوریفیس کوچکتر از اندازه محدودیت نازل است، که به فشار منبع اجازه می دهد تا زمانی که فلپر از نازل دور است، از طریق محدودیت ثابت وارد یونیت شود.
بنابراین، یک تغییر فشار کوچک در ورودی، تغییر زیادی در فشار محفظه نازل ایجاد می کند.
ژنراتور سیگنال خروجی
اتصال کانورتر ورودی به ژنراتور خروجی
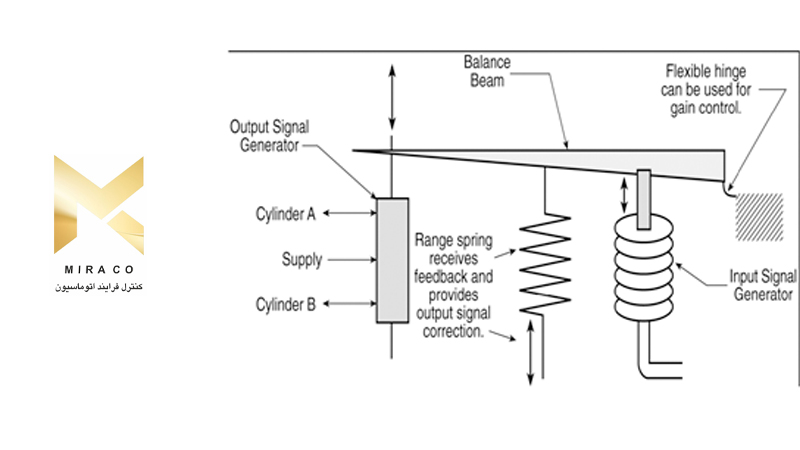
کانورتر سیگنال ورودی یک حرکت خطی می فرستد که توسط ژنراتور سیگنال خروجی به یکی از دو روش استفاده می شود:
حرکت خطی مستقیماً برای ایجاد حرکت ژنراتور سیگنال خروجی و انتقال سیگنال خروجی استفاده می شود. به عنوان مثال، یک حرکت خطی دیافراگم ورودی مستقیماً به استم یک کنترل ولو جهت قرقره کشویی متصل می شود.
حرکت خطی برای حرکت یک پرتو تعادل استفاده می شود که باعث می شود ژنراتور سیگنال خروجی حرکت و سیگنال خروجی تولید کند.
انواع ژنراتورهای سیگنال خروجی
اصطلاح تولید کننده سیگنال خروجی عملکرد چندین نوع مکانیزم مختلف را توصیف می کند که برای ارائه سیگنال خروجی استفاده می شود. اصطلاحات سازنده برای توصیف عملکرد مولد سیگنال خروجی بسیار متفاوت است و شامل شیر پایلوت، رله پنوماتیک، تقویت کننده پنوماتیک و رله می شود.
تصحیح سیگنال خروجی :
تصحیح سیگنال خروجی استفاده از بازخورد برای باطل کردن یا متعادل کردن خروجی زمانی است که موقعیت مورد نظر به دست آمده باشد .
رابط بین شیر و پوزیشنر
برای شروع فرآیند تعادل، میله، براکت یا وسیله مناسب دیگری به استم متصل می شود.
دستگاه به صورت مکانیکی به سمت پوزیشنر هدایت می شود تا حرکت مناسب مورد استفاده توسط پوزیشنر را فراهم کند: چرخش یا فشار-کشش خطی. اگر حرکت چرخشی باشد، ورودی به پوزیشنر یک اهرم است.
ورودی پوزیشنر
یک حرکت بازخورد خطی همیشه منجر به یک بازخورد متناسب می شود تا نیروی تعادلی برای بی اثر کردن خروجی ایجاد کند. به عبارت دیگر، مهم نیست که استم کجا باشد، هر مقدار از حرکت استم همیشه به همان مقدار اما متناسب حرکت در پوزیشنر منجر می شود.
ممکن است رابطی وجود داشته باشد که اجازه می دهد محدوده ورودی تنظیم شود، اما حرکت خطی باقی می ماند. گاهی اوقات لازم است این ورودی اصلاح شود. اینجاست که حرکت چرخشی وارد می شود.
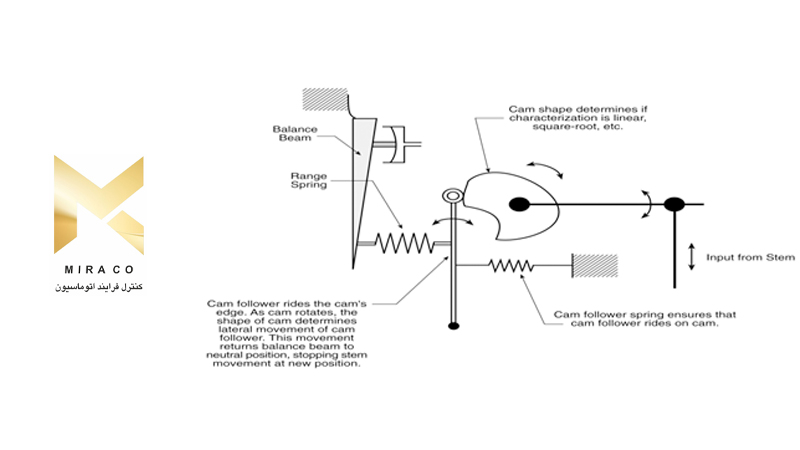
حرکت چرخشی در پوزیشنر برای اصلاح بازخورد به صورت غیر خطی در صورت تمایل استفاده می شود. دلیل غیر خطی شدن آن جبران مقداری غیرخطی بودن در حلقه کنترل است. روش جهانی برای انجام این کار با استفاده از دوربین است. ورودی از استم باعث می شود اهرم ورودی بادامک را بچرخاند.
دنبال کننده بادامک روی لبه بادامک سوار می شود و کانتور بادامک را دنبال می کند. این اجازه می دهد تا حرکت اصلی اهرم ورودی قبل از استفاده برای تصحیح خروجی از طریق پرتو تعادل تغییر یا مشخص شود.
کاربردهای پوزیشنر
تغییر پاسخ شیر
کنترل اکچویتور دوگانه
افزایش نیروهای Shutoff
تقسیم بندی
تأخیر به دلیل فاصله بین کنترلر یا کانورتر I/P و شیر.
کالیبراسیون
هدف از کالیبراسیون یا تراز، اطمینان از عملکرد صحیح پوزیشنر در محدوده تحمل طراحی است.
فرآیند اصلی کالیبراسیون شامل سه مرحله است:
تایید مجموعه Bench
هم ترازی پیوند بازخورد، از جمله تراز بادامک
تنظیم صفر و span
کالیبراسیون درون خطی یا آنلاین
برای سفارش و یا خرید انواع محصولات ابزار دقیق و همچنین کسب اطلاعات بیشتر و مشاوره رایگان با شماره های 88341674-021 | 88341172-021 تماس حاصل فرمایید.
[/fusion_text][fusion_person name=”تیم تولیدمحتوای میراکنترل” title=”میراکنترل؛کنترل فرایند اتوماسیون” picture=”https://miracontroller.com/wp-content/uploads/2021/02/icons8-manager-80.png” picture_id=”21002|full” pic_link=”” linktarget=”_self” pic_style=”” pic_style_blur=”” pic_style_color=”” pic_bordersize=”” pic_bordercolor=”” pic_borderradius=”” hover_type=”none” background_color=”” content_alignment=”center” icon_position=”bottom” social_icon_boxed=”” social_icon_boxed_radius=”” social_icon_color_type=”” social_icon_colors=”” social_icon_boxed_colors=”” social_icon_tooltip=”left” blogger=”” deviantart=”” digg=”” dribbble=”” dropbox=”” facebook=”” flickr=”” forrst=”” instagram=”” linkedin=”” myspace=”” paypal=”” pinterest=”” reddit=”” rss=”” skype=”” soundcloud=”” spotify=”” tumblr=”” twitter=”” vimeo=”” vk=”” whatsapp=”https://wa.me/989125376505″ xing=”” yahoo=”” yelp=”” youtube=”” email=”info@miracontroller.ir” show_custom=”no” hide_on_mobile=”small-visibility,medium-visibility,large-visibility” class=”” id=””]تمامی محتوای قرارگرفته در این سایت نتیجه زحمات یکایک افراد تیم تولیدمحتوای میراکنترل است. استفاده از این مطالب با ذکر منبع بلامانع می باشد.[/fusion_person][/fusion_builder_column][/fusion_builder_row][/fusion_builder_container]