



در این مقاله روش تنظیم یک حلقه کنترل فرایند دما را بررسی می کنیم.
🔹ارائه دهنده: تیم تولید محتوای میراکنترل
روش تنظیم زیگلر-نیکولز باز حلقه کنترل شبیهسازی شده
فرایند کنترل دما در این مرحله شبیهسازی شده است. انجام یک آزمون باز حلقه (دو تغییرات 10 درصدی در خروجی، هر دو انجام شده در حالت دستی) بر روی این فرایند منجر به رفتار زیر شده است:
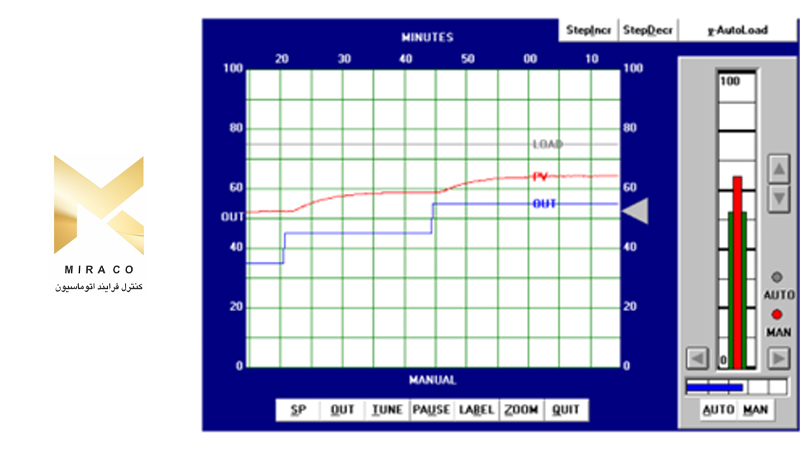
با توجه به روند، به نظر میرسد که فرایند خودتنظیم با یک ثابت زمانی (تاخیر) کند و یک زمان مرده قابل توجه دارد. نرخ واکنش (R) در تغییر گام اولیه 30 درصد در 30 دقیقه، یا 1 درصد در هر دقیقه است. زمان مرده (L) تقریباً 1.25 دقیقه به نظر میرسد. با توجه به ویژگیهای فرایند مذکور، پیشنهادات زیگلر-نیکولز برای تنظیم PID مبتنی بر این ویژگیهای فرایند (همچنین شامل مقدار تغییر گام 10 درصد Δm) به شرح زیر است:
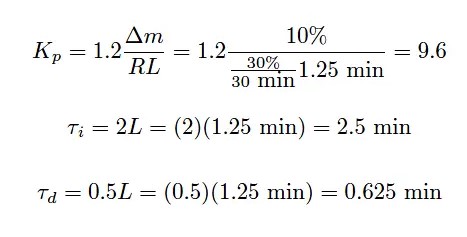
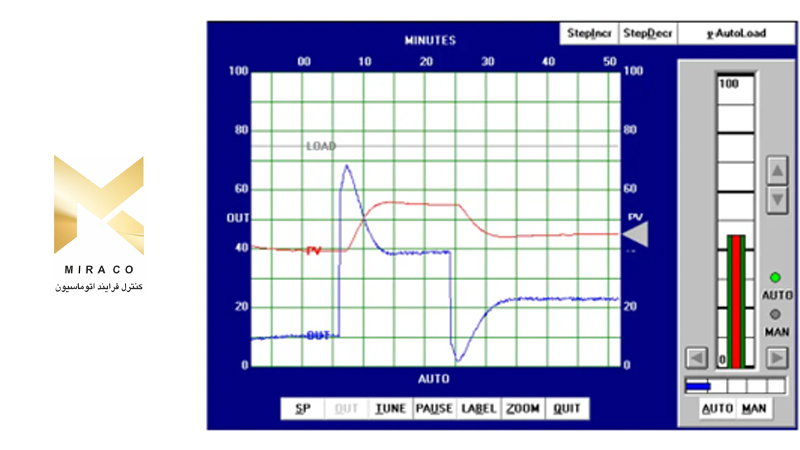
پیدا کردن مقادیر PID برابر با 9.6 (ضریب تقویت، gain)، 2.5 دقیقه برای هر تکرار (انتگرال) و 0.625 دقیقه (مشتق)، نتیجه زیر را در حالت اتوماتیک به دنبال داشت:
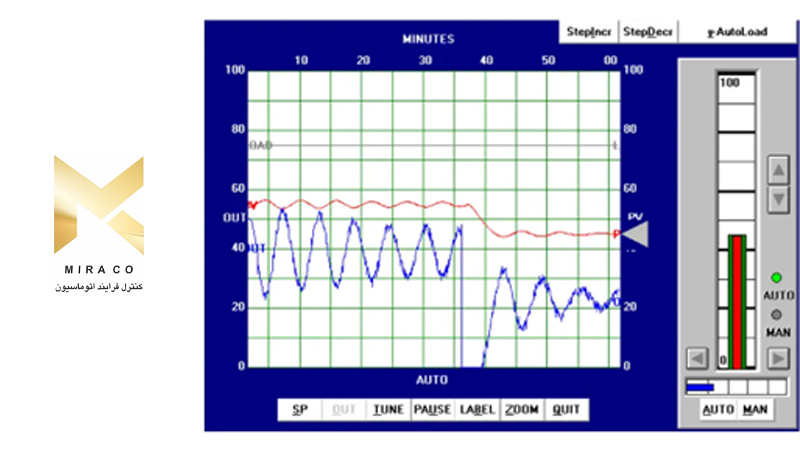
به عنوان مشاهده میتوانید ببینید که نتایج نسبتاً ضعیفی دارند. مقدار PV هنوز با یک دامنه ارتعاشی تا حدود 20٪ از زمان مخلوط کنندهی آخرین فرآیند در زمان تغییر SP به پایین 10٪ به تغییر برخورد کرده است. به علاوه، مدل خروجی به طریقهی نویزی نیز است، که نشان دهندهٔ افزایش بیش از حد نویز فرآیند توسط کنترلکننده است.
روش تنظیم حلقه بسته Ziegler-Nichols
بعدازاین مرحله، روش تنظیم حلقه بسته یا “نهایی” Ziegler و Nichols به این فرآیند اعمال شد. حذف هر دو عمل کنترلی انتگرال و مشتق از کنترل کننده و آزمایش با ارزشهای گوناگون (نسبی) تا ارتعاشهای خود تکرارشونده با دامنه ثابت به دست آمد، مقدار gain برابر با 15 به دست آمد:
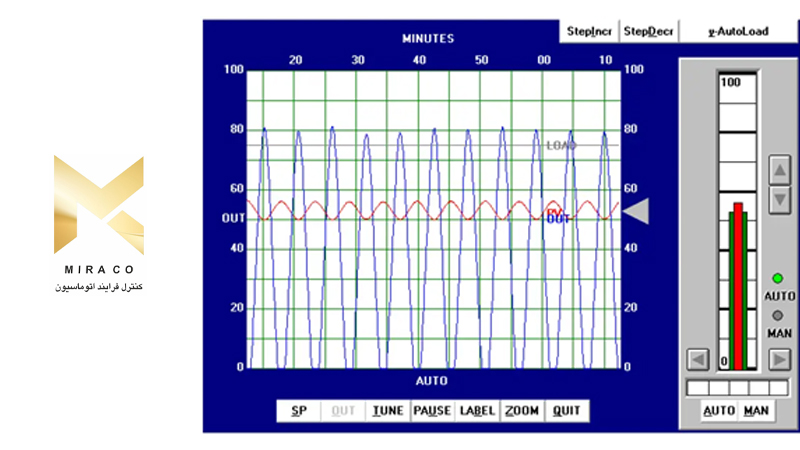
از روند میتوانیم ببینیم که دورهٔ نهایی (Pu) تقریباً 5.2 دقیقه طول دارد. با توجه به مشخصات فرآیند، دستورالعملهای Ziegler-Nichols برای تنظیم PID بر اساس این ویژگیهای فرآیند عبارتند از:
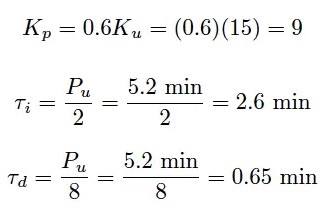
این مقادیر تنظیم PID بسیار شبیه به آنچه توسط روش باز “نرخ واکنش” پیشبینی شدهاست، بنابراین میتوانیم انتظار داشته باشیم نتایج بسیار شبیه به هم باشند.
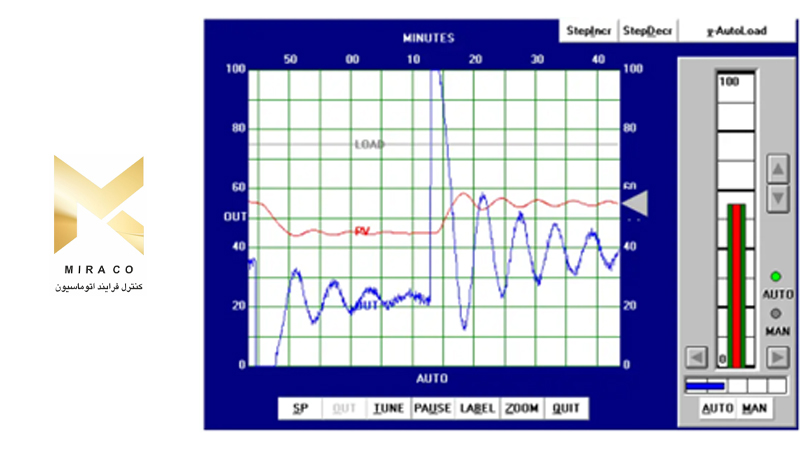
همانطور که انتظار میرفت، هنوز نوسانات بیش از حد پس از تغییر 10٪ نقطه تنظیم را مشاهده میکنیم، همچنین “نویز” بیش از حدی در روند خروجی وجود دارد.
رویه تنظیم تجربی
از آزمایش اولیه در حالت باز حلقه (تغییر گامی خروجی دستی)، مشاهده کردیم که این فرایند خودراهانداز با زمان تأخیر کند و تاخیر معتبری دارد. طبیعت خودراهاندازی فرایند از اقدامات کنترلی حداقلی جهت حذف افت ولتاژ (offset) تقاضا میکند، اما اگر این حجم بیش از حد شود، به دلیل تأخیر و تاخیر زمانی زیاد، باعث نوسان میشود. وجود بیش از 1 دقیقه تاخیر فرآیند نیز استفاده از اقدامات پرونده موثر را ناممکن میکند. عملکرد مشتقی، که به طور کلی موثر در غلبه بر تاخیرات است، در اینجا مشکلاتی را به دلیل تقویت نویز فرآیند به وجود میآورد. خلاصه کنیم، ما انتظار داریم که مقادیر ملایم تنظیم متناسب، انتگرالی و مشتقی را برای دستیابی به کنترل مناسب با این فرآیند استفاده کنیم. هر چیزی که بیش از اندازه موثر باشد، مشکلاتی برای این فرآیند ایجاد خواهد کرد.
پس از انجام تجربیات، به مقادیر 3 (ضریب)، 5 دقیقه (انتگرال) و 0.5 دقیقه (مشتق) رسیدم. این مقادیر تنظیم، یک اقدام متناسب کمتر از چهارم مقدار توصیه شده توسط Ziegler-Nichols و یک عملکرد انتگرالی حدود نصف مقدار توصیه شده توسط Ziegler-Nichols را نشان میدهد. نتایج این مقادیر تنظیم در حالت اتوماتیک به شرح زیر است:
به عنوان دیده میشود، پاسخ سیستم تقریباً هیچ گونه افتزایی ندارد (با یک تغییر نقطهی تنظیم 10% یا 15%) و بسیار کم “نویز” در روند خروجی دارد. واکنش به تغییرات نقطهی تنظیم نسبتاً قوی است که در نظر گرفتن طبیعت طبیعی کند فرآیند: هر نقطه تنظیم جدید در حدود 7.5 دقیقه پس از تغییر گامی دستی به دست میآید.
برای سفارش و یا خرید انواع محصولات ابزار دقیق و همچنین کسب اطلاعات بیشتر و مشاوره رایگان با شماره های 88341674-021 | 88341172-021 تماس حاصل فرمایید.
منبع: